Road Brain
2018-10
1. Background
This summer I joined Research Team for Smart Transport Emerging computing and Perception for an engineering project internship, instructed by Professor Yuchuan Du. The main purpose of this project is to build a “digital twin” for the Inovation Port of Shanghai Automobile City, and provide a monitor platform and postioning service for the driveless vehicle tested in the park.

2. Pipeline
The whole pipeline of this project is camera-based. I started with building the 3D reconstruction map of the park and using computer vision method to detect and track vehicles.
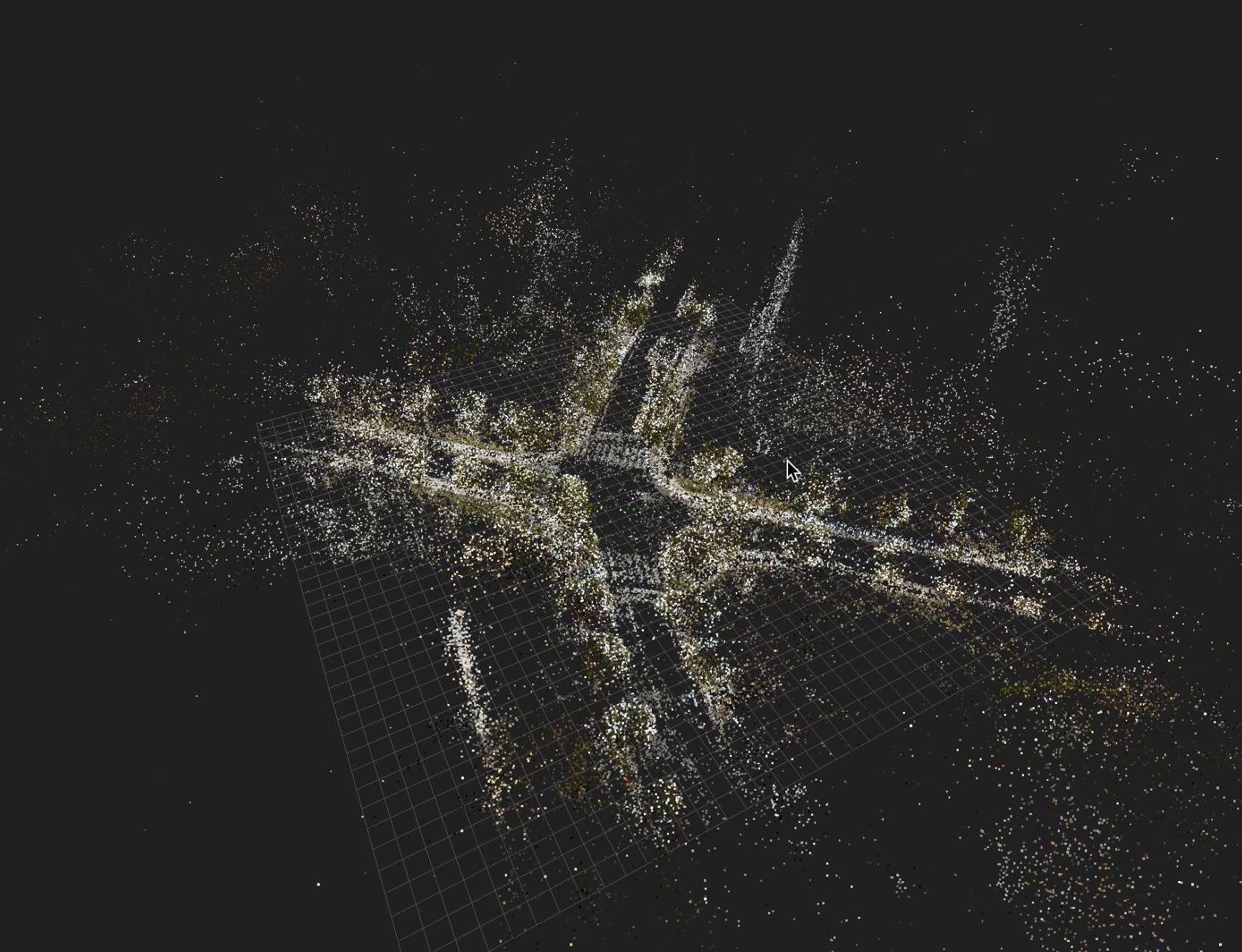
I splitted the park into several intersections, each intersection contains 1-2 monocular survilience cameras. We collected large amount of geo-tagged images captured by a LadyBug camera for each intersection, and then used Structure-from-Motion method to build 3D reconstruction map.
Based on video streams collected by surveillance cameras, I implemented CNN based detection and feature-based tracking algorithm to detect and track car’s 3d pose. Afterward, a simple calibration algorithm is implemented for locating the cars in the 3D map.
I tested some detection models, such as YOLO V3 and SSD, and finally used a keypoints-based GNN (Graph neural network) model to detect the car keypoints, then projected the vehicle keypoints into the reconstrcution map by camera matrix calibrated before.



The whole pipeline can run in real-time. We can analyze the entire trajectory of a car when it driving across multiple cameras. Since the whole system is camera-based, it can also work well in the underground parking lot, where the GPS service may not be available. The tracking pipeline is the same, but the re-identification model should be enhanced since the occlusion of the car. We use plate number combined with feature-based re-identification model (Deep SORT) to make sure the vehicle could be tracked across different cameras.




3. Future Work
- Multi-classes Tracking: Now we only focus on vehicle tracking and localization, this pipeline can also be extented to any targets on road (bicycle, pedestrian) and reconstruct them in a digital world.
- Data Fusion: We are also testing millimeter-wave radar to detect speed and direction of target, the video camera data and radar data can be merged to imporve the accuracy and speed.